CT-guided Fine-Needle Insertion Robot
Needle insertion has been a common application for cancer treatments such as biopsy, drug injection, radio frequency ablation, and cryotherapy. Fine-needle insertion can contribute to reduce risks of complications (e.g. tissue damages, bleeding and trauma). However, the fine-needle is easily deflected and thereby physicians are required to have high-skills to insert the needle into cancers accurately. Moreover, in case of a CT-guided therapy, radiation exposure for patients is increased given that the procedure is repeated due to the misplacement.
Our proposed robotic system can achieve an accurate placement with 25 G (diameter 0.5 mm) needle in lower-abdomen by using 1) insertion control method which applies a combination of rotation and vibration to the needle and 2) insertion path planning with CT images which can determine an optimal insertion path based on anatomical structures.

Media & Press Release
- WBS "進行がん ロボットで治療 0.5ミリの針 腫瘍へ正確に"
- IT-Media "数ミリの腫瘍に針を刺せるロボットアーム がん治療への活用に期待"
数ミリの腫瘍に針を刺せるロボットアーム がん治療への活用に期待 - ITmedia NEWS
医療ロボットの開発を手掛けるROCK&LOTUSが、熟練医師でも難しいがん治療法を正確に実行できるロボット「IRIS」(アイリス)を発表。医師の治療スキルに依存しない医療行…

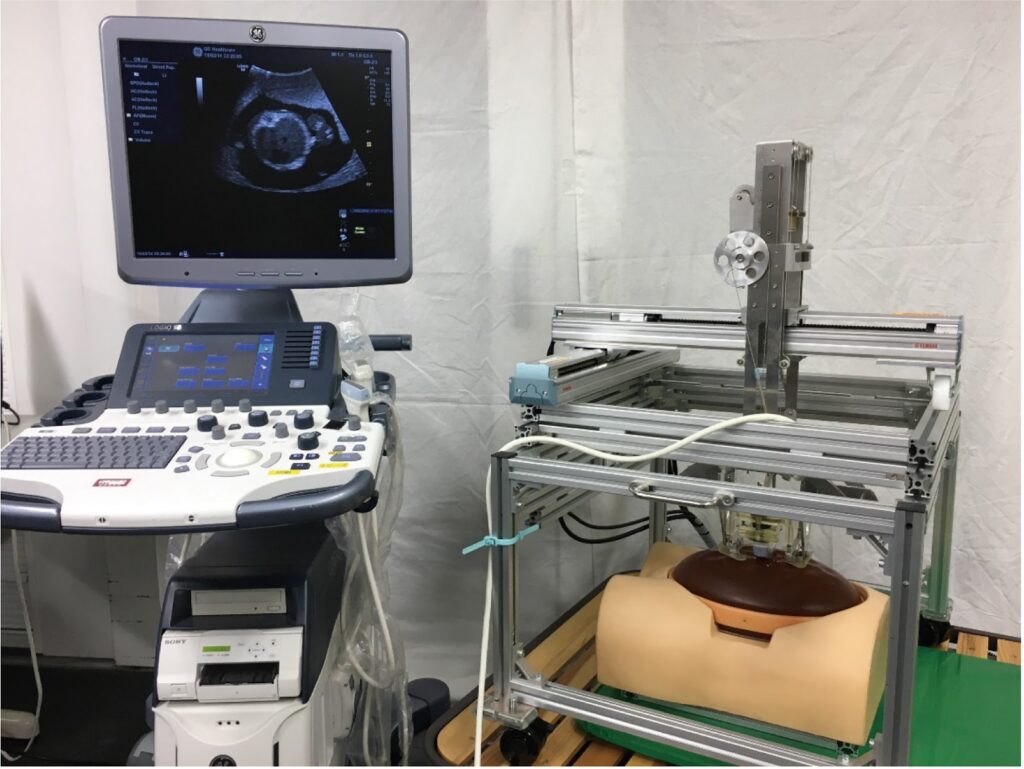
Robotic Ultrasonography for Prenatal Care
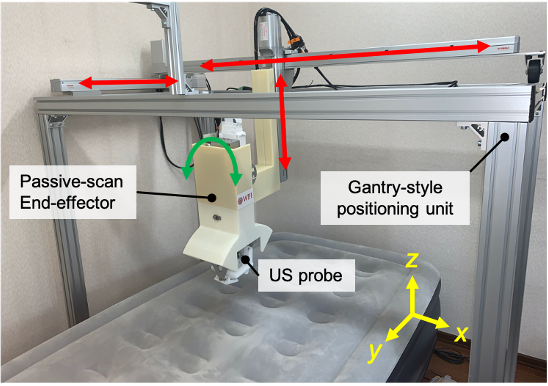
A shortage of obstetrician and gynecologist has grown seriously in developed countries. Our long-term goal is to develop the robotic prenatal care platform for conducting ultrasound (US) scan automatically to improve the efficiency of the obstetrician and gynecologist’s workflow. We aim to develop a hardware platform for positioning the US probe to correct diagnostic US images under satisfying the safety for fetus and pregnant women.
Our proposed system includes the mechanism to maintain the contact force in a certain range and to adjust the US probe posture to the body surface passively, which is designed based on clinical survey data. To validate the proof-of-concept, we conducted the robotic US scan and corrected the posture angle of the US probe, the contact force and US images with an agar phantom. Subsequently, to confirm clinical feasibilities, we embarked the robotic US scan to three pregnant women by physician’s operation.
The experimental results demonstrated the passive US scan motion following the phantom surface under an acceptable contact force. The clinical trials were safely carried out with observations of fetal body parts.
Media & Press Release
- 高性能ロボットは医療現場の問題を解決できる?
- エコー検査の自動化ロボをベンチャーが開発,妊婦の身体的な負担軽減目指す
エコー検査の自動化ロボをベンチャーが開発、妊婦の身体的な負担軽減目指す | 日経クロステック(xTECH)
妊婦向けロボットを開発するInowaは2019年9月3日、妊婦腹部のエコー検査を自動化するロボットを発表した。

- 孕婦超音波體檢可由AI機器人代勞 過程更安全影像更清楚
孕婦超音波體檢可由AI機器人代勞 過程更安全影像更清楚
工業4.0(Industry 4.0)強調無人工廠,但相關技術不只能用在工廠,日本2019年9月3~7日舉辦的日本機器人學會第37回研討會(RSJ 2019)中,日本醫療設備新創企業INOWA...

Tele-Operated Robotic Lung Ultrasonography for COVID-19
Novel severe acute respiratory syndrome coronavirus 2 (COVID-19) has become a pandemic of epic proportions, and global response to prepare health systems worldwide is of utmost importance. 2-dimensional (2D) lung ultrasound (LUS) has emerged as a rapid, noninvasive imaging tool for diagnosing COVID-19 infected patients. Concerns surrounding LUS include the disparity of infected patients and healthcare providers, and importantly, the requirement for substantial physical contact between the patient and operator, increasing the risk of transmission. New variants of COVID-19 will continue to emerge; therefore, mitigation of the virus's spread is of paramount importance.
A tele-operative robotic ultrasound platform capable of performing LUS in COVID-19 infected patients may be of significant benefit, especially in low- and middle-income countries. The authors address the issues mentioned above surrounding the use of LUS in COVID-19 infected patients and the potential for extension of this technology in a resource-limited environment. Additionally, first-time application, feasibility, and safety were validated in healthy subjects. Preliminary results demonstrate that our platform allows for the successful acquisition and application of robotic LUS in humans.
Media & Press Release
- WPI Developing Safe COVID-19 Detection Robotic Ultrasound
wpi-covid-19-detection
A $300,000 grant will allow a team at WPI to develop a robotic ultrasound machine to detect COVD-19.
- WPI Leads International Team in Developing Safe and Affordable Robotic Ultrasound for COVID-19 Detection
WPI Leads International Team in Developing Safe and Affordable Robotic Ultrasound for COVID-19 Detection
Funding from the NIH will help support a system that can remotely identify signs of the disease in the lungs to better protect healthcare providers.